
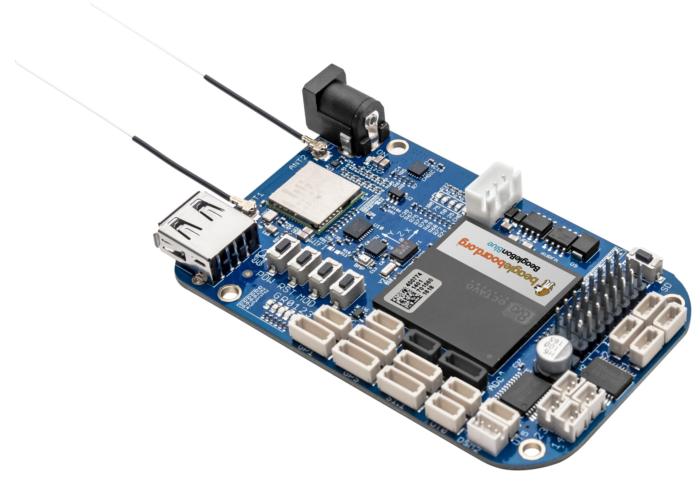
The BeagleBone Blue from BeagleBoard.org is a credit-card sized board with all the components needed to operate a robot or even a drone. It is open source, as its schematics have been published, and developers can replicate the board.
It has the components and software package needed to build medium-sized or small robots. It includes servo motors, electronic speed controllers, DC motor controllers, and sensors that aid in robot movement and sensing. It has the components needed to load and support a two-cell lithium-polymer battery.
ROS software sits on top of Debian Linux, and it’s the main OS supported by BeagleBone Blue.
About technical specification:
- Processor Octavo Systems OSD3358 1GHz ARM® Cortex-A8
- 512MB DDR3 RAM integrated
- Integrated power management
- 2×32-bit 200-MHz programmable real-time units (PRUs)
- ARM Cortex-M3
- On-board 4GB 8-bit eMMC flash storage programmed with Debian Linux
Software compatibility:
- Debian, ROS, Ardupilot, …
- Graphical programming, Cloud9 IDE on Node.js
- plus much more
Connectivity and sensors:
- Battery: 2-cell LiPo support with balancing, 9-18V charger input
- Wireless: 802.11bgn, Bluetooth 4.1 and BLE
- Motor control: 8 6V servo out, 4 DC motor out, 4 quadrature encoder in
- Sensors: 9 axis IMU, barometer
- Connectivity: HighSpeed USB 2.0 client and host
- User interface: 11 user programmable LEDs, 2 user programmable buttons
- Easy connect interfaces for adding additional sensors such as: GPS, DSM2 radio, UARTs, SPI, I2C, 1.8V analog, 3.3V GPIOs
