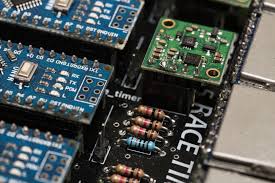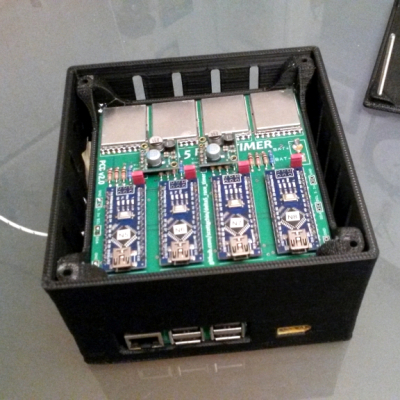
The Delta 5 Race Timer is an open-source multi-node timing system that uses the video signals from FPV vehicles to determine when they cross the start/finish line. The heart of the system is a Raspberry Pi, and each node has a dedicated Arduino Nano and RX5808 module.
The Arduinos are themselves connected to the Raspberry Pi over I2C, allowing the Pi high-level control over the receivers while it serves up a web-enabled user interface. As a bonus, the Pi can do much more than simply act as a fancy stopwatch. The races themselves can be entirely organized and run through the web interface.
The Raspberry Pi runs the Raspbian OS, and the Delta 5 system uses a server component written in Python.
Delta 5 Race Timer features are:
- The system hosts its own web server which is used to control the system, no additional software is needed, any device with a web browser can connect
- Automatic calibration; the system sets triggers at the start of each race
- Manage pilot names, assign them to heats, and after each race save the results to a local database
- Supports the standard 40 FPV video channels