Most will want to use their new drone to fly and shoot videos. On the other hand, getting inside and customizing a drone will be of interest to many engineers and programmers. There are a number of options available, but today I’m going to speak about the Intel Aero Compute Board.
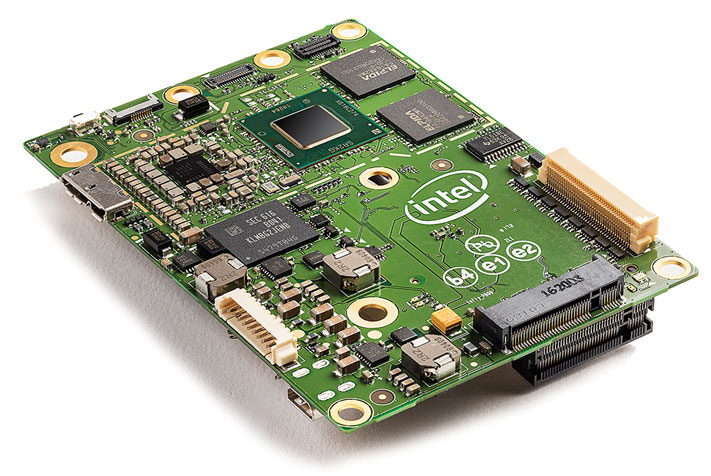
The Aero Compute Board is an open-source platform for building drones. It is designed to support a range of sensors, including the firm’s RealSense technology. The board is based on a quad-core, Atom x7-Z8750 processor with 4 GB of LPDDR3, 32 GB of eMMC flash, and a dual-band Wireless-AC 8260 with 802.11ac support using a 2×2 MIMO configuration. It includes MIPI CSI-2 camera interfaces. The board can be used for a range of robotic projects, not just in drones.
An example of what can be done with the Aero Compute Board is the Intel Aero Ready to Fly Drone. It is a quadcopter that integrates the Intel Aero Compute Board and a RealSense sensor.
The open-source platform runs Linux. The matching flight controller comes preprogrammed with Dronecode PX4 from the Dronecode and PX4 projects. PX4 autopilot is the core of the Dronecode project.
Developers do not have to start from scratch. There is the AirMap SDK that consists of a number of modules and interfaces, including the Pilot API, the Status API that supports geofencing, and the Flight API. The Flight API will support the Digital Notice and Awareness System (D-NAS).

