
The project consists of a car and a Bluetooth remote controller that allows you to control the movement and speed of the car through the tilt angle (similar to a Nintendo Wii remote).
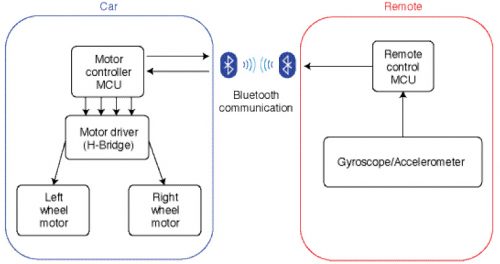
The microcontroller receives acceleration data from the accelerometer, calculates the tilt angle of the remote controller and sends this data via Bluetooth to the car which translates the measurements in a direction and speed for the left and right motors.
The remote controller includes a 5V powered HC-05 Bluetooth module connected directly to the RX and TX pins of the ATmega1284P to communicate through UART. The HC-05 on the remote has been configured to automatically pair with the other HC-05 Bluetooth module on the car and vice versa.
