Another interesting project aims at more use of the Beagleboard Black as a motion controller:
What is it
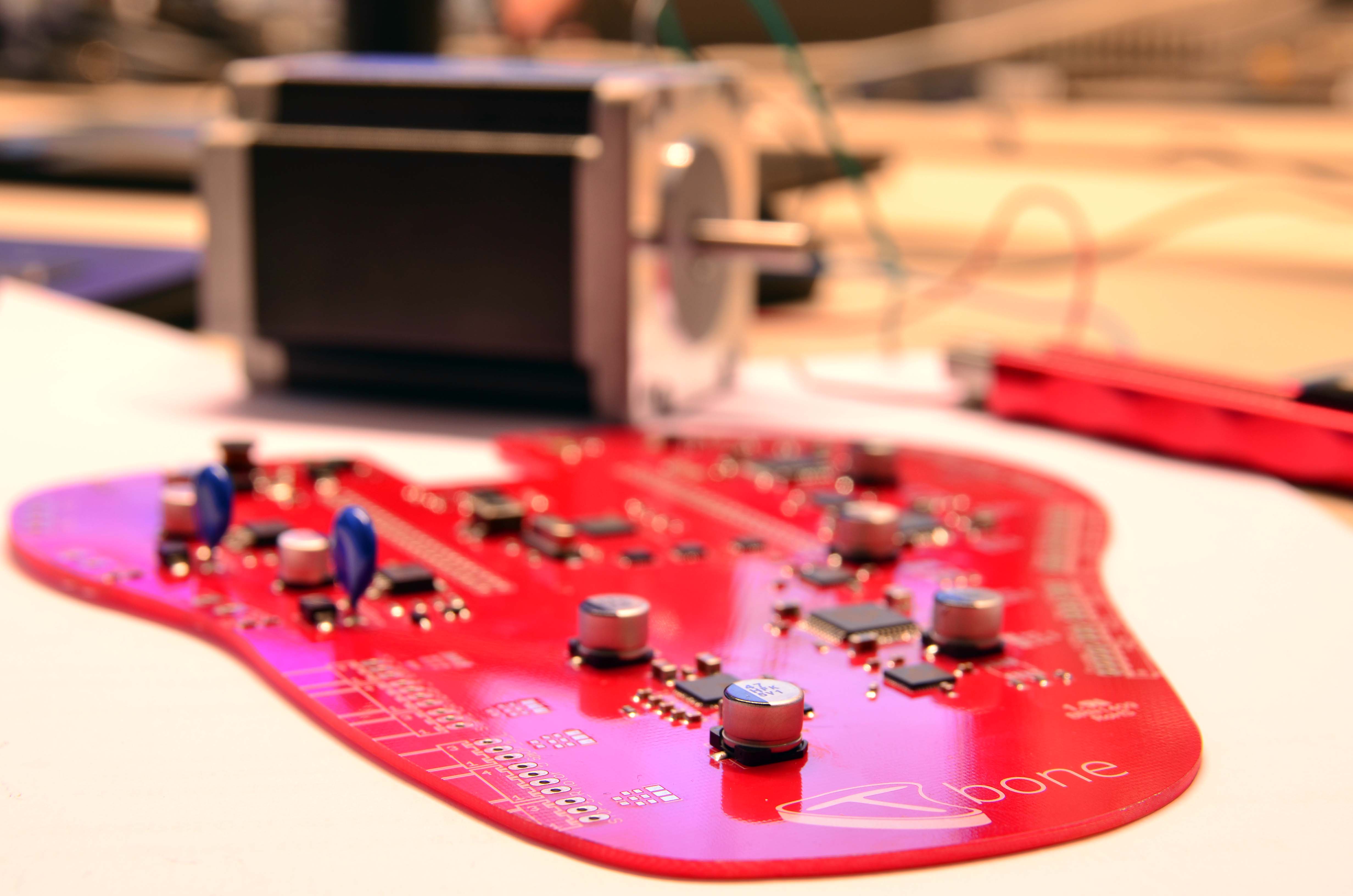
The T-Bone is a cape for the BeagleBone Black, dedicated for motion control. These are 3D printers, laser cutters, milling machines, and other applications using stepper motors.
The T-Bone will come preprogrammed for Reprap Mendel 3D Printer. Best kown in the Prusa Mendel or Prusa i3 variant. The Software will include low level drivers, the printer application and a high level Web Interface for control. Just connect your steppers, heaters and sensors, configure the software and you are ready to print.
To join highest performance with flexibility and easy programming, we use a very powerful concept: Hard- and software abstraction layers! User interface, configuration, G-Code interpreter, and path planner are running on the BeagleBone. This makes it easy to use existing open source software components, using the existing toolchain on the Linux operating systems of the BeagleBone. Real-time communication with the BeagleBone is handled by a small microcontroller, placed on the T-Bone. The microcontroller is fully compatible with the Arduino toolchain, so everybody can easily modify it. Complex acceleration and velocity calculations for the stepper motors are done by dedicated motion controllers. These are dedicated hardware components, developed to get the maximum performance out of a given stepper motor without putting any workload to the host system.

[…] Another interesting project aims at more use of the Beagleboard Black as a motion controller: What is it The T-Bone is a cape for the BeagleBone Black, dedicated for motion control. […]
[…] Source:via Open Electronics […]