Intrinsyc Technologies Corporation announced the distribution of Qualcomm Flight™ Pro Reference Platform with high-end performance capabilities to advance consumer drones and robotics. Intrinsyc has opened pre-orders at $949, with shipments due in early January.
The new board is smaller than a credit card (75x36mm) and brings together photography, video, navigation, and communication technologies on a single board. Qualcomm Flight Pro reference platform runs Linux on a Snapdragon 820 with WiFi, BT, GNSS, IMUs, 4x cameras, and optional motor board.
The system runs on a Linux 3.18 and Yocto/OpenEmbedded based stack with SDK, a Docker container, and support for the Robot Operating System (ROS). An optional Qualcomm Navigator SDK supports autonomous, vision-supported WiFi-based flight controls with advanced flight modes, built-in sensor calibration, and automatic flight logging. The SDK supports assisted flight modes, including VISLAM and DFS, based on the Qualcomm machine vision SDK.
Specifications:
Main Board: SoC – Qualcomm® APQ8096SG
Memory:
- DDR: SDHC 4 GB LPDDR4
- UFS: 32 GB, UFS 2.0, HS-G3 1-Lane
- SD Card: 4-bit microSD slot
Sensors:
- IMU (Gyroscope, Accelerometer, Compass): Dual Invensense MPU9250
- Pressure sensor (Barometer): Bosch BMP280
- Off-Board/External: I2C and UART on several connectors for expansion.
Connectivity: Pre-certified WLAN/BT Module – Qualcomm® QCA6174A 802.11ac 2×2 MIMO BT 4.2
Location:
- Onboard: Qualcomm® WGR7640 GNSS solution
- Offboard: UBlox GPS module (Third-party accessory)
LEDs: RGB and discrete Red and Green LEDs for on-board status.
Debugging: UART via expansion connector and USB-serial adapter cable
Cameras:
- One High Resolution forward-facing camera: 13MP IMX214 Sony sensor in KLT Module, 4K at 30 fps, MIPI 4-lane CSI-0 interface
- One Downward Facing Camera: OV7251 OmniVision sensor in Sunny MD102A module – B & W VGA Sensor – MIPI 1+1-Lane CSI-2
- Two Stereo Cameras: OV7251 OmniVision sensor in Sunny GP161C module – B & W VGA Sensor – MIPI 1-Lane CSI-1
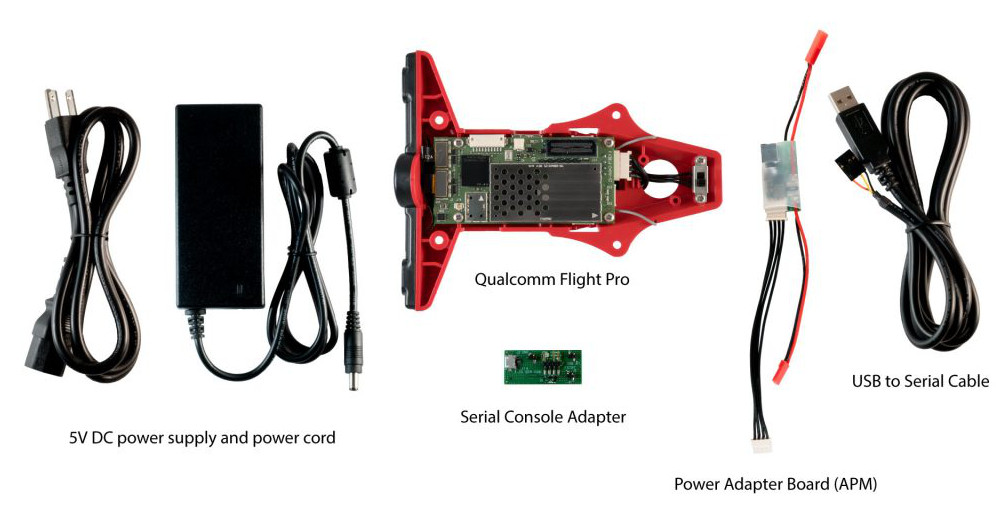
Additional Development Kit Components:
- Advanced Power Module (APM) Cable:
- Smart and advanced power supply converter board configured into a cable, to connect power to Qualcomm Flight Platform from either the provided 5V DC power supply or a 2S-6S LiPo battery (regulated to 5V)
- The cable circuitry prioritizes the 5V DC external supply whenever present, and secondly the battery
- Serial Console Adapter – Custom UART – USB adapter to support standard Linux console interface
- Custom FTDI Debug Cable – Cable (only 3 pins instead of the 6 provided by FTDI) with standard-A type USB plug for connecting the serial console adapter to Qualcomm Flight Platform.
- 5V DC power supply
Software:
- Yocto OpenEmbedded-based build system
- Linux kernel 3.18
- Apps development through SDK (cross-compiler toolchain) and Docker container
- Compatible with Qualcomm Navigator SDK (available separately from Qualcomm Technologies).
Qualcomm Flight Pro documentation is also available on GitHub.