The Picam360 is open source Raspberry Pi based camera that takes panoramic pictures in 360 degrees horizontally and 235 degrees vertically, controlled through a web browser and Surface Walker is an open source aquatic drone built around this Picam360 platform.
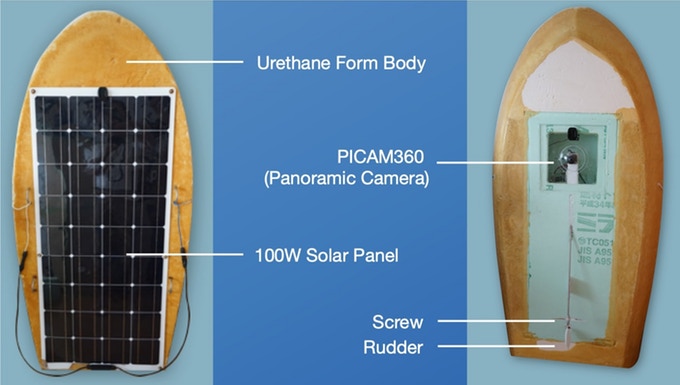
The Surface Walker is a watercraft with a urethane foam hull, a 100 Watt solar panel, a rudder, and the Picam360 camera unit on the bottom of the hull. The hull is 1500 x 650 x 100 millimeters in size and weighs 5 kilograms before the 12.6 Volt lithium ion battery is added. The solar panel on the top surface is 18 Volt and 100 Watts while the solar charging unit is 20 Amps and 20 Volts. The system uses both Arduino Uno and Raspberry Pi Model B 3+ boards for control, and the craft can reach speeds up to 5 knots.
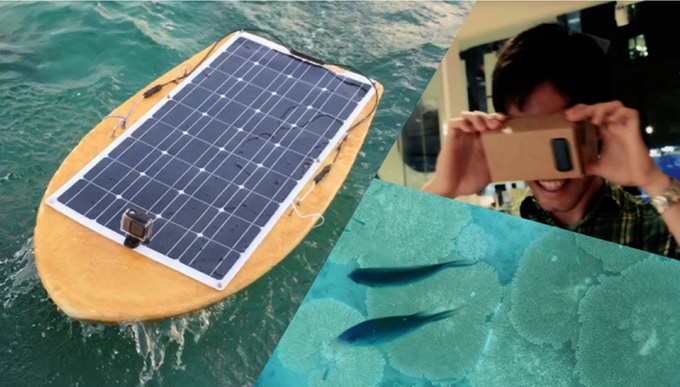
In Access Point mode, the SurfaceWalker will allow you to connect to it directly with a smartphone. What’s more, by using it with a USB 3G dongle (which is for connecting to the internet while outdoors), you can operate the SurfaceWalker from any place where there’s an internet connection. As one example of the possibilities, this will allow you to have fun viewing the beautiful undersea scenery of a far-away place, from the comfort of your own home.
The long term goal of the Surface Walker is the creation of a visual database of natural environmental features. Images and videos recorded by the drone will be used to create two different tools: OpenCyanoMap and OpenCoralMap, to visualize respectively the cyanobacterial concentrations in a place and the condition of coral over time.
The Great Barrier Reef, the American Pacific Coast, and Okinawa are the three regions where the Surface Walker will take large sets of visual data and create a record that can be compared to data at future states.
The Picam360 SurfaceWalker is available to back on Kickstarter with early bird pledges available from roughly $265 or £200, with worldwide delivery expected to take place during January 2019.
