In experiments involving a simulation of the human esophagus and stomach, researchers at MIT, the University of Sheffield, and the Tokyo Institute of Technology have demonstrated a tiny origami robot that can unfold itself from a swallowed capsule and, steered by external magnetic fields, crawl across the stomach wall to remove a swallowed button battery or patch a wound.
The new work, which the researchers are presenting this week at the International Conference on Robotics and Automation, builds on a long sequence of papers on origami robots from the research group of Daniela Rus, the Andrew and Erna Viterbi Professor in MIT’s Department of Electrical Engineering and Computer Science.
Joining Rus on the paper are first author Shuhei Miyashita, who was a postdoc at CSAIL when the work was done and is now a lecturer in electronics at the University of York, in England; Steven Guitron, a graduate student in mechanical engineering; Shuguang Li, a CSAIL postdoc; Kazuhiro Yoshida of Tokyo Institute of Technology, who was visiting MIT on sabbatical when the work was done; and Dana Damian of the University of Sheffield, in England.
Although the new robot is a successor to one reported at the same conference last year, the design of its body is significantly different. Like its predecessor, it can propel itself using what’s called a “stick-slip” motion, in which its appendages stick to a surface through friction when it executes a move, but slip free again when its body flexes to change its weight distribution.
Also like its predecessor — and like several other origami robots from the Rus group — the new robot consists of two layers of structural material sandwiching a material that shrinks when heated. A pattern of slits in the outer layers determines how the robot will fold when the middle layer contracts.
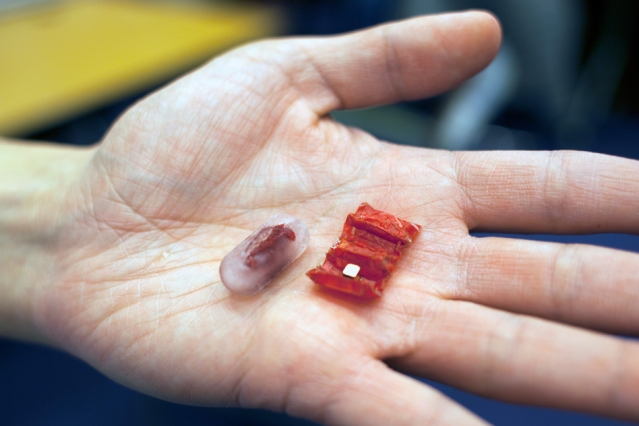
Source: Ingestible origami robot | MIT News
