TrussFormer is the outcome of a research performed by Hasso Plattner Institute in Germany and the U.S. which have been working on a way to turn empty bottles into kinetic art.
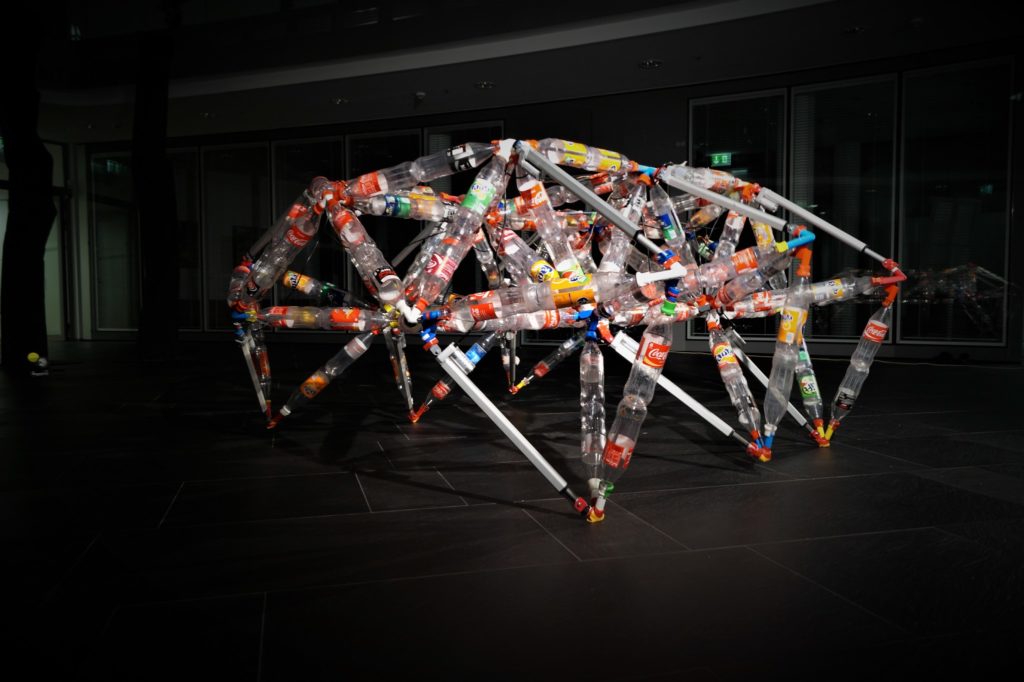
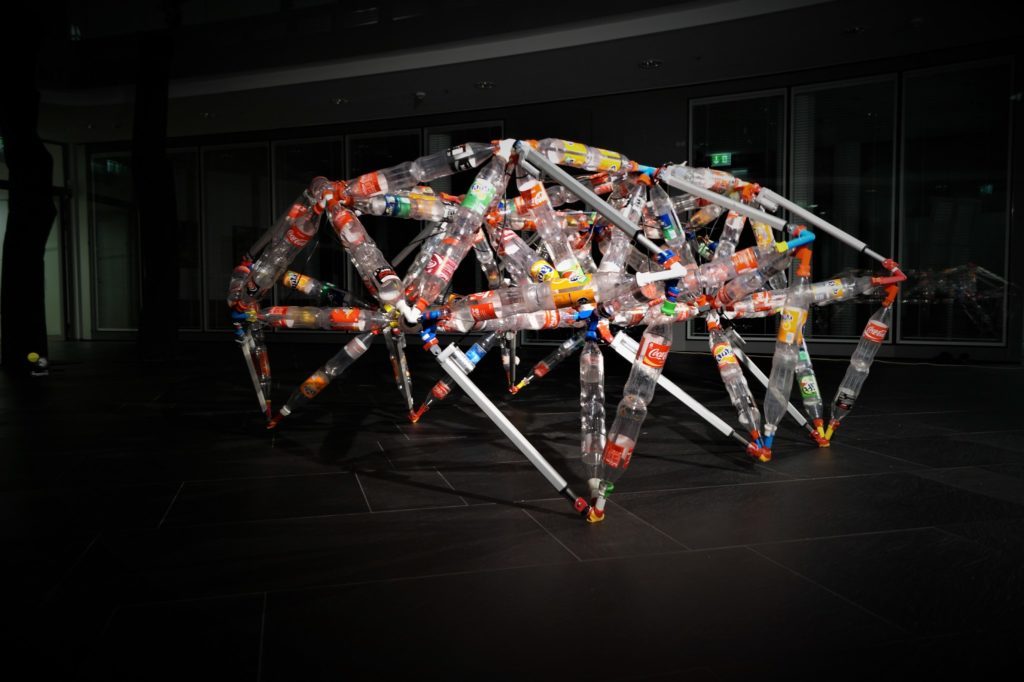
TrussFormer program is an integrated end-to-end software solution that allows users to design and 3D print large-scale kinetic structures using plastic bottles. The structure can then be animated using an Arduino Nano to control a series of pneumatic actuators.
The design process begins in the program’s editor where the user will create a static design. The next step is to add movement to this structure using either automated placement, placing assets, or manual placement. A virtual simulation is generated to test the motion that is integrated into the structure, showing a color-coded depiction of where compression and tension will take place.
The TrussFormer software also generates an animation sequence to check whether or not the structure will hold up against inertia.
TrussFormer helps users in the 3 main steps along the design process. (1) It enables users to animate large truss structures by adding linear actuators to them. It offers three tools for this purpose: manual actuator placement, placement of assets performing predefined motion, and creating motion by demonstration. (2) TrussFormer validates the design in real time against static forces, static forces across all poses, and dynamic forces. (3) TrussFormer automatically generates the necessary 3D printable hinges for fabricating the structure. Its algorithm determines the placement and configuration of the hinges and their exact dimensions.
