A self-balancing robot is a great way to get introduced to control theory and robotics in general. The ability for a robot to sense its position and its current set of circumstances and then to make a proportional response to accomplish its goal is key to all robotics.
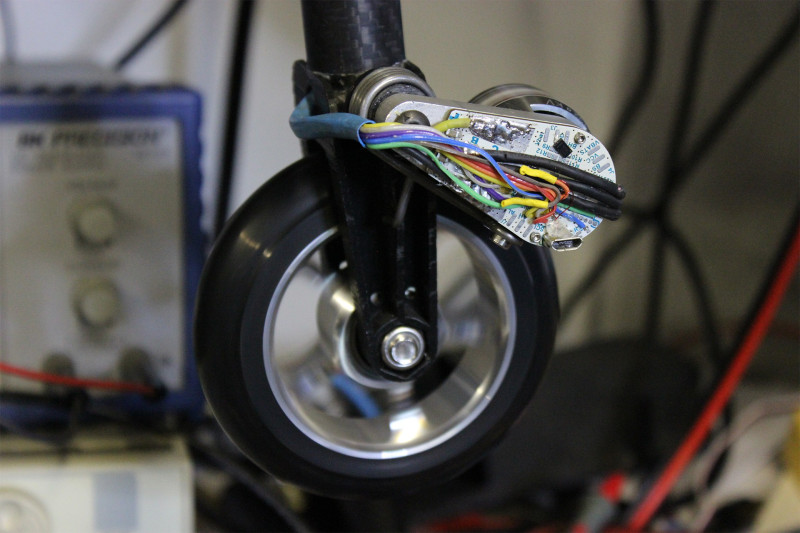
While hobby robots might use cheap servos or brushed motors, for any more advanced balancing robot you might want to reach for a brushless DC motor and a new fully open-source controller.
SmoothControl is looking to create a fully open source design for these motors. The controller is designed to run on the ubiquitous ATmega32U4 with an open source 3-phase driver board.
They are currently using these boards with two specific motors but plan to also support more motors as the project grows.
The main problem with brushless DC motors is that they don’t perform very well at low velocities. To combat this downside, there are a large number of specialized controllers on the market that can help mitigate their behavior. Until now, all of these controllers have been locked down and proprietary.
Thanks to SmoothControl, an open source driver for brushless DC motors that does the work for us seems appealing.
