The robot, which will cost about $80 in parts, uses two stepper motors for greater movement precision than could be had with normal DC models. Regular DC motors can have mechanical friction and electric resistance differences. This can cause performance differences. As a result the robot will not move in a straight line.
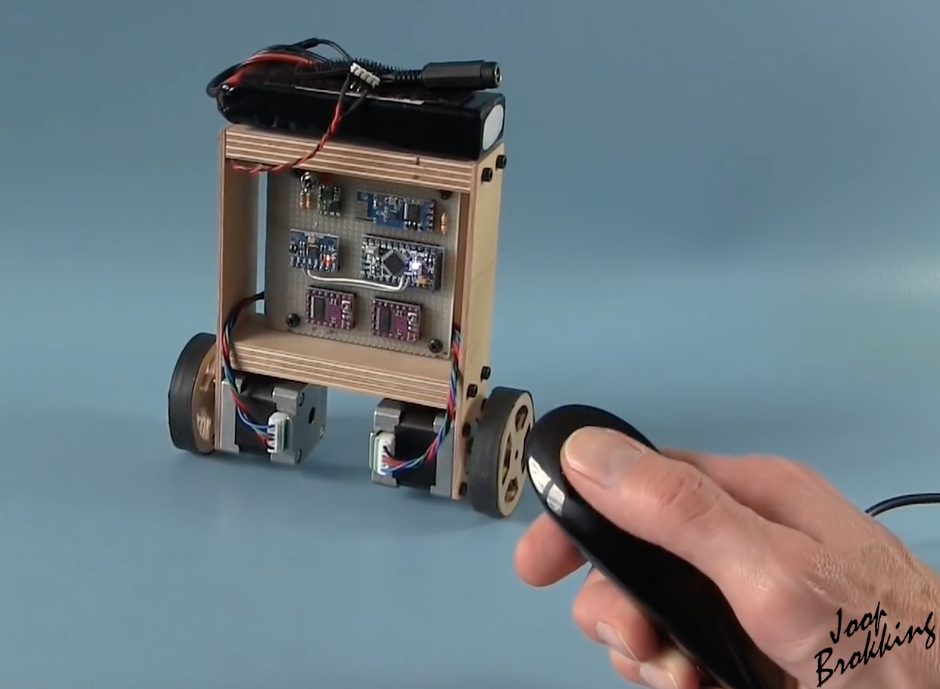
This bot employs an Arduino Pro Mini, along with an MPU-6050 accelerometer/gyroscope for control.
It can be driven around by a Wii U-style nunchuck, which transmits to the robot via an Arduino Uno and wireless transceiver module.
The Arduino program that you can download for free is 100% self-written and not based on any other software. The code is well commented and clearly explained. This makes it possible to further develop the code for your own purpose.
To build this robot you need the following hardware:
• 1 x Arduino pro mini clone
• 1 x FTDI USB to TTL programmer for the Arduino pro mini
• 1 x Arduino Uno clone
• 1 x MPU-6050 gyro and accelerometer
• 2 x 2.4G wireless serial transceiver module
• 2 x Stepper motor
• 2 x Geeetech StepStick DRV8825
• 1 x Wired nunchuck controller for Wii
• 1 x Mini DC 7~28V to DC 5V step-down converter
• 1 x 11.1V 2200mAh 30C Li-polymer Battery
• 1 x B3AC 2S/3S Lipo balance charger
You can find more info about this project here.
Joop Brokking takes you through his design for this type of bot in the video seen here, making it accessible if you’d like to build your own.
