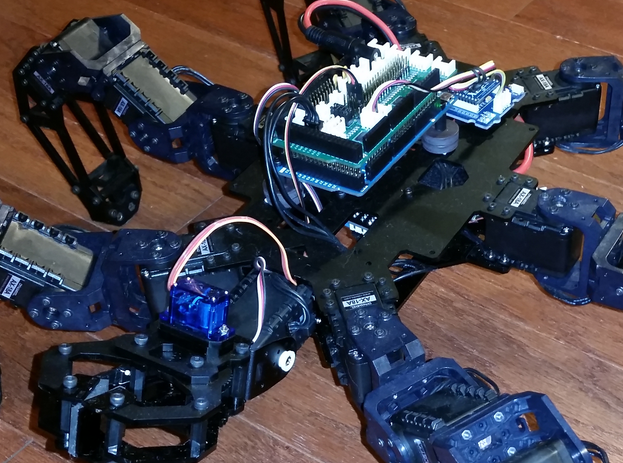
The “one man band” of the open source hardware robotics solution. With this shield, making your own robot is plain sailing!
The DynamixShield is an electronics board that fits onto an Arduino Due microcontroller to give you the ability to control Dynamixel smart servos and regular servos, while also providing numerous Grove and RobotGeek connectors. Grove and RobotGeek are hardware frameworks for modular sensors and actuators. There are tons of off-the-shelf modules for these two frameworks that can be plugged into the shield with a single cable. This includes everything from GPS sensors, RFID scanners, and LCD displays that are plug-and-play ready for use with the shield. This makes it very easy to build your robots by combining modules and servos.
Here is a complete list of its features:
- 4 Dynamixel servo connectors.
- A jumper for each Dynamixel connector to power it from the shield or an independent supply.
- 7 Digital Grove connectors (14 total signal lines, 2 per Grove connection).
- 6 of the Digital lines can be used for pulse-width modulation (PWM) to control regular servos.
- 4 Analog Grove connectors (8 total signal lines).
- 2 Independent serial Grove connectors.
- 2 Independent I2C Grove connectors.
- 19 Digital 3-pin connectors.
- 12 of the digital 3-pin connectors are PWM for control of regular servos.
- A jumper to control the power source for PWM header lines.
- 12 Analog to digital 3-pin connectors.
- A jumper to route battery supply to Vin of Arduino.
- All of these digital lines, including serial and I2C, are level shifted to 5V.
