NEWS! Access the schematic of the printer here on the Rep Rap Wiki
Few months ago, after long months of testing, assembling and disassembling, print trials,and countless sleepless nights we finally decided to give birth our interpretation of the RepRap project.

First steps
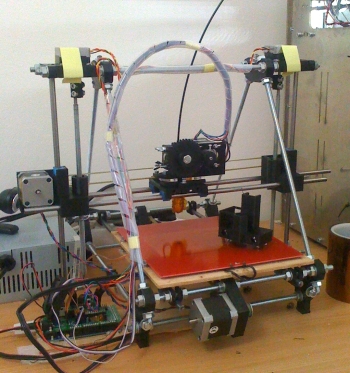 When we picked up the first RepRap kit, an elaboration of a Mendel, we spent the first couple of days to navigate between videos, screws, threaded rods and bolts: it wasn’t difficult, but surely the assembly was not so obvious and linear.
When we picked up the first RepRap kit, an elaboration of a Mendel, we spent the first couple of days to navigate between videos, screws, threaded rods and bolts: it wasn’t difficult, but surely the assembly was not so obvious and linear.
While the Prusa Mendel, the reference model and most “popular” RepRap version, can count on a myriad of mechanical parts, accessories and modifications that can be used from scratch, other RepRaps – with variations and changes in the structure – always require an assessment of the applicability of this or that changes you find online.
In light of our experience, we started planning our version of Mendel with three simple goals: ease of installation, Prusa Mendel comparable performance, 100% compatibility with RepRap electronics, firmware and software.
After two months, the light
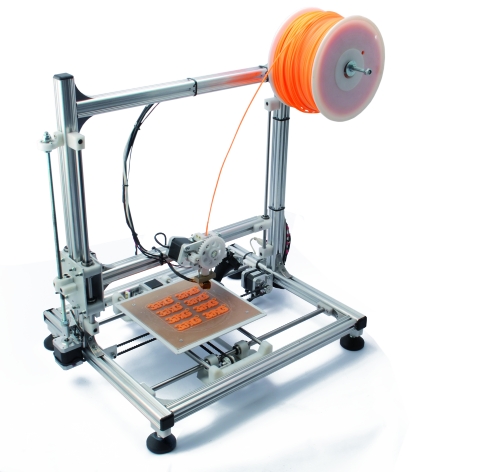
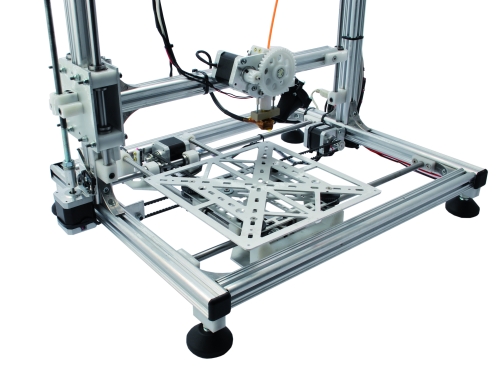
Pursuing simplicity of assembly led us to abandon molded plastic parts and M8 threaded rods and switch to aluminum profiles with shapes designed with fixing parts in mind.
In exchange for this very stable structure that you can assemble with simple sequences, our printer is not “compatible” with the world of RepRap mechanical tweaks. Each part is designed to be light where needed, such as with the plate drive system, and rigid to suppress vibrations and unwanted resonances.
Compared to a Mendel, our printer uses the X/Y the plate and Z for the dolly. This allowed us to simplify the extrusion system that no longer have to move on a horizontal axis: is simply attached to the structure that moves along the Z axis.
The printing plate support, then, is designed to accommodate a “base” of epoxy glass that combines good adhesion with the PLA, dimensional stability and it’s quite cheap. The surface of the epoxy glass base must be treated with fine sandpaper to expose the fiberglass. From our trials you get a smooth matte finish along with an excellent grip, even with pieces of a certain size. Compared with many other solutions we tested during experimentation, this is proving to be the most interesting solution with PLA prints. The dimensions of the support, however, are suitable for mounting of a Prusa floor heating standard solution (about 21 x 21 cm) on which you can set a printing plate provided that this is not too heavy. One of the first prints made with our printer, it is worth to mention, is the half Eiffel Tower that was carried out at approximately 85 mm per second with a vertical height of about 20 centimeters. The result has left us amazed at first, because from an initial setting of a 60(120) mm/sec in printing(moving), we realized we’d left a speed increase of 140% on Repetier-Host. Nevertheless, the entire structure was almost perfect, with fine detail and precision in elements positioning. The image of the molded part is still more than a thousand words.
Finally kit are available.
With the results achieved, and after few more months of refinements, we can finally release our mechanical interpretation of a RepRap we think of ourselves not exempt from offering everything in a practical and complete kits.
As said, electronics are fully compatible with the firmware and software from RepRap world. This will allow you to upgrade your printer with the new firmware and software solutions that gradually people will be able to create to make 3D printing easier and more intuitive.
The Marlin firmware is provided configured to reflect: the mechanical characteristics of the belts, the position and the direction of rotation of the motors and the connection type of the of Home (0,0,0) positions detection microswitches. Using a 0022 or 0023 Arduino IDE you can reprogram the board with all the simplicity of a single click of the mouse.
Marlin, moreover, can be reconfigured in a simple manner by intervening in the source file “Configuration.h” which contains all the functional parameters and mechanics characteristics. To make the printing and adjustment simpler and more repeatable we have combined the microswitch a series of screws which allow fine adjustment of each zero position. This is not an automatic adjustment, but once you have adjusted the screws in the correct way, you will have a steady and reliable positioning.

And, if this is open source, where is the “source” (schematics and BOM)?
I have to publish a lot of other post, with schematics, connections and also BOM.
And I’ll publish all materials on reprap.org site
you must have a little patience
;-)
Here’s it! > reprap.org/wiki/3drag
The dxf files from reprap.org/wiki/3drag are 2D drawings!
Of course, with a little imagination the 3D objects can be “recreated”, but I don’t understand why you put only 2d drawings…
The dxf files from reprap.org/wiki/3drag are 2D drawings!
Of course, with a little imagination the 3D objects can be “recreated”, but I don’t understand why you put only 2d drawings…
Sorry Oscar, “you” means mr. Landoni, of course!
Hi,
The file are in 2D because you have to use a CNC. The first version of 3Drag uses Delrin parts. Now the new version uses plastic parts and includes the heated plate.
Any ideas of aluminium profile model size etc?
For the prototipe we buy it fron a local brico center
is it 40×40 size? http://www.item24.co.uk/en/home/products/product-catalogue/products/construction-profiles-5.html
No, more small 27,5 x 27,5
thanks!
Hello I assembly a V.1.2 from futura elettronica, I have been struggling with the extruder calibration. I have tried the method of measuring the difference between the real extrusion and a 100 mm extrusion from the Repetier, then by rule of three calculate the amount of steeps for compensate that difference. however seems it’s not working, have any idea ?
Hi, why are you modifing the default configuration?
The 3Drag is preconfigured.
[…] e idee da stampare. 3Drag: the Open Electronics way to RepRap. NEWS! Access the schematic of the printer here on the Rep Rap Wiki Few months ago, after long […]
Can you deliver to Dubai or India?