
The first version (1.0.0) of Mercury System Framework (MSF) has been released. The Mercury System Framework (MSF) is a layered SW framework specifically designed to support application development with Mercury System. It provides to the user a complete set of base functionalities to easily interface MS Slave Boards (SB) and Modem Boards (MB) as well as some infrastructural and system services.
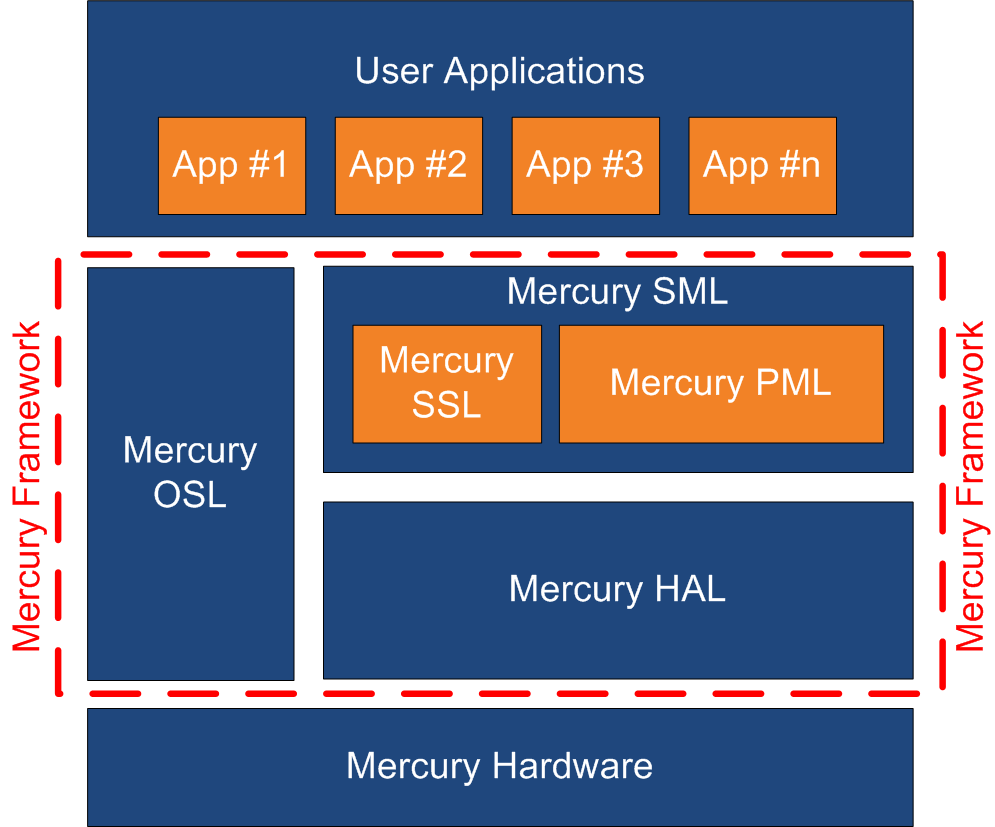
The framework is made up by the following components:
HAL (Hardware Abstraction Layer): the purpose of this layer is to abstract the HW dependencies to the upper layers.
SML (System Management Layer): the purpose of this layer is to provide services for the management of communication buses (I2C, UART) and for the management of Mercury System’s Modem Board (WiFi, BT, GSM/GPRS). It also provides a set of System Services, like System Power Management, RTCC, USB terminal, etc. It’s divided into two main components:
- PML: Peripheral Management Layer,
- SSL: System Services Layer.
OSL (Operative System Layer): this layer is made up by a lightweight RTOS that provides basic services to the system, like scheduling tables for the various tasks, Events, SW Timers, Alarms, etc…
The Mercury System Framework provides a broad set of functionalities that help the user in the developing of applications. The management of all buses and Modem communication stacks is provided along with services for the handling of the most useful microcontroller internal peripheral (RTCC, ADC, USB, Power Management, etc.). Moreover, a simple real-time OS implementation with services likes schedule tables, SW timers, alarms, etc. is provided.
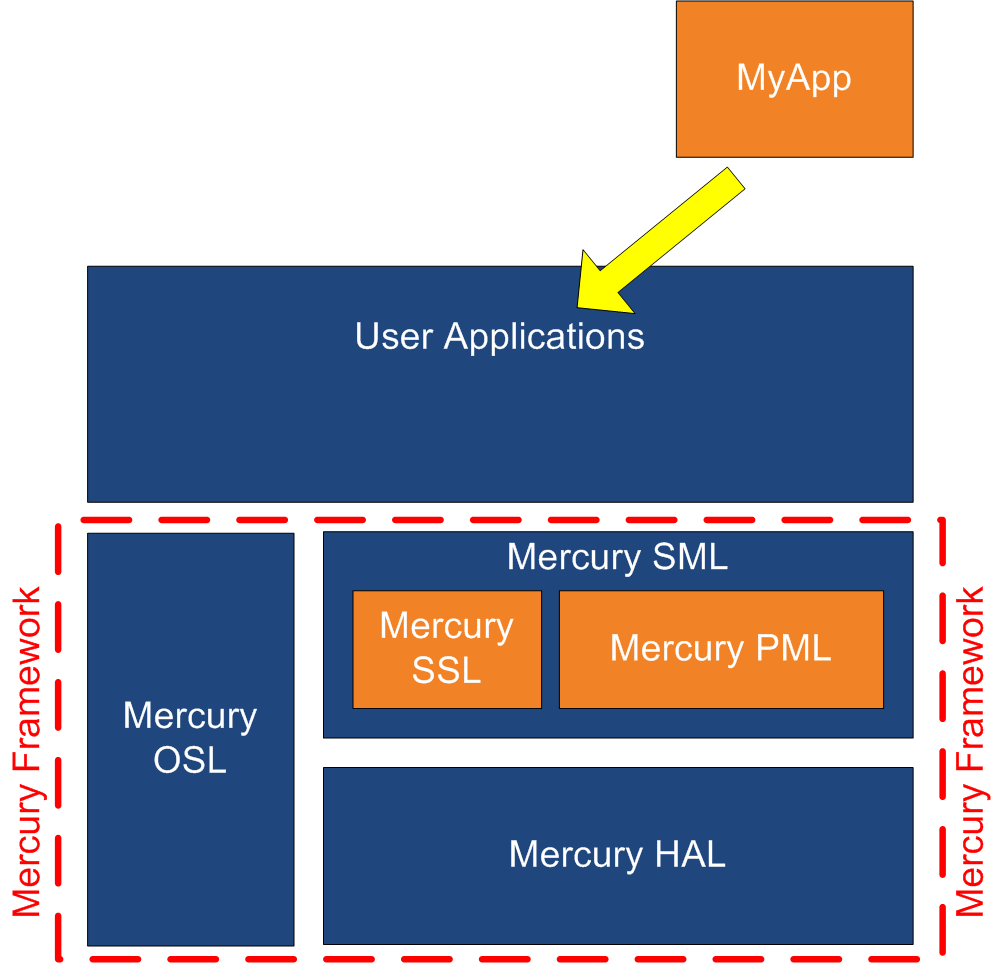
The user has to implement only the high-level application logic and schedule a period function to implement his own application:
You can buy the Mercury modules from OpenStore
Have fun!
