
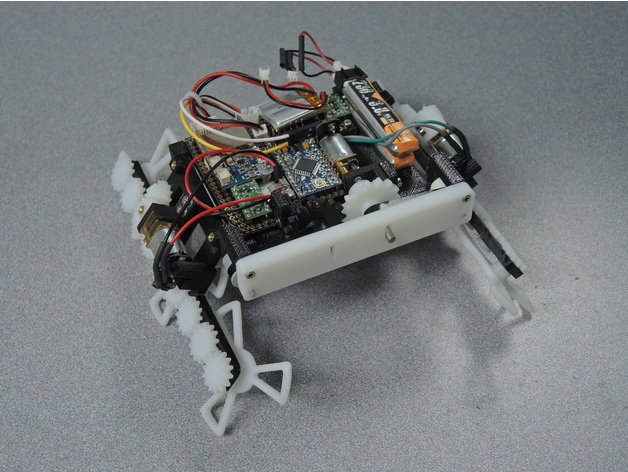
Starting from an existing design from a 2013 research done at UC Berkeley, this Arduino-powered bot created by Ali Aslam is built entirely from printed parts and off the shelf hardware.
An Arduino Pro Mini combined with tiny Pololu motor controllers is enough to get the bot rolling, and a Flysky FS-X6B receiver is onboard so the whole thing can be operated with a standard RC transmitter
The key to the design are the folding wings which allow the robot to raise and lower itself on command. This not only helps it navigate tight spaces, but also gives it considerable all-terrain capability when it’s riding high.
Rather than wheels or tracks, the design uses six rotors which look more like propellers than something you’d expect to find on a ground vehicle. These rotors work at the extreme angles necessary when the robot has lowered itself, and allow it to step over obstructions when they’re vertical.
For further information you can visit the Thingiverse page or watch the video below.
