San Francisco based robotics firm Husarion, which has previously launched an industrial picker robot called the RoboCore, has gone to Crowd Supply to pitch a new Husarion Core2 prototyping platform for the robotics maker community.
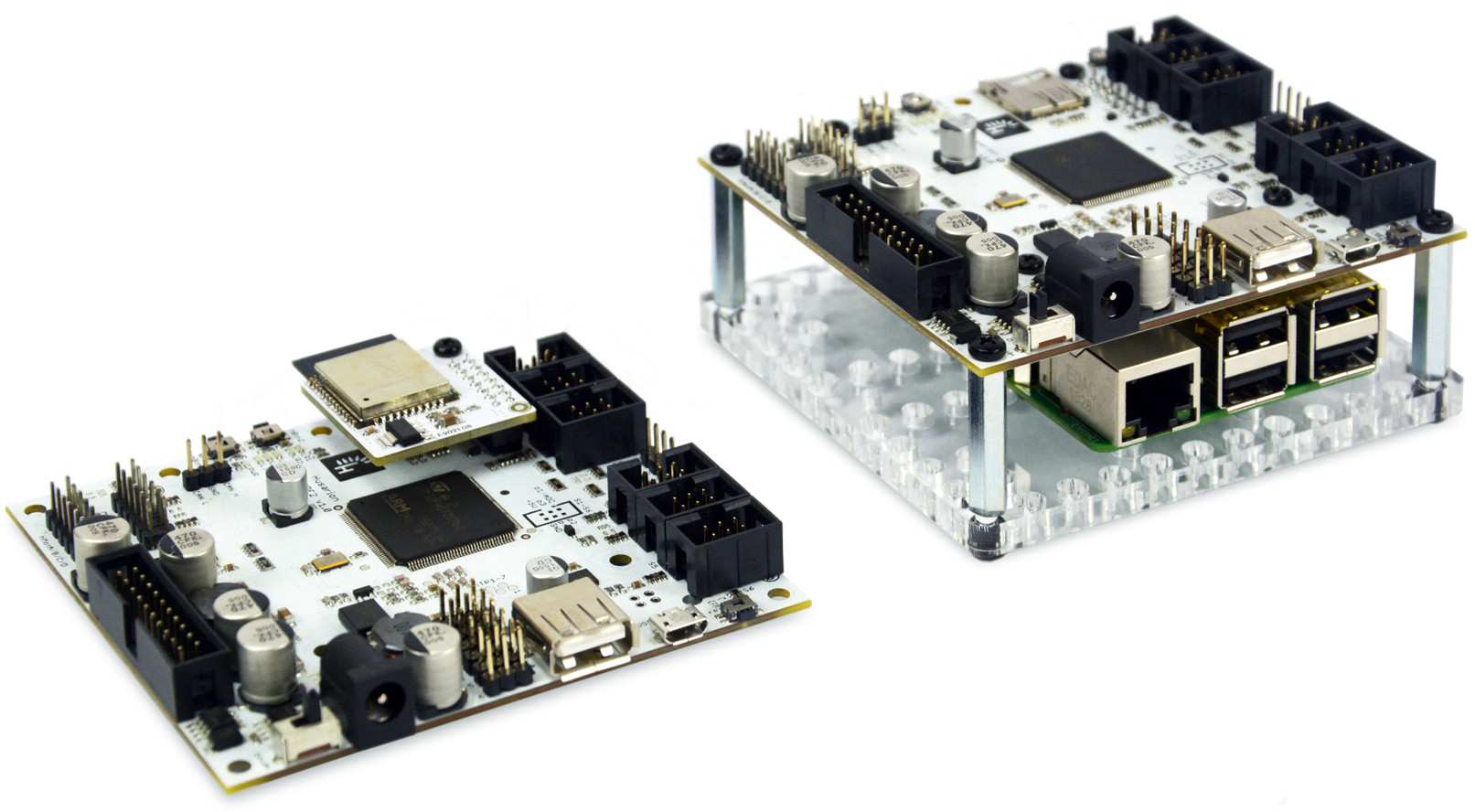
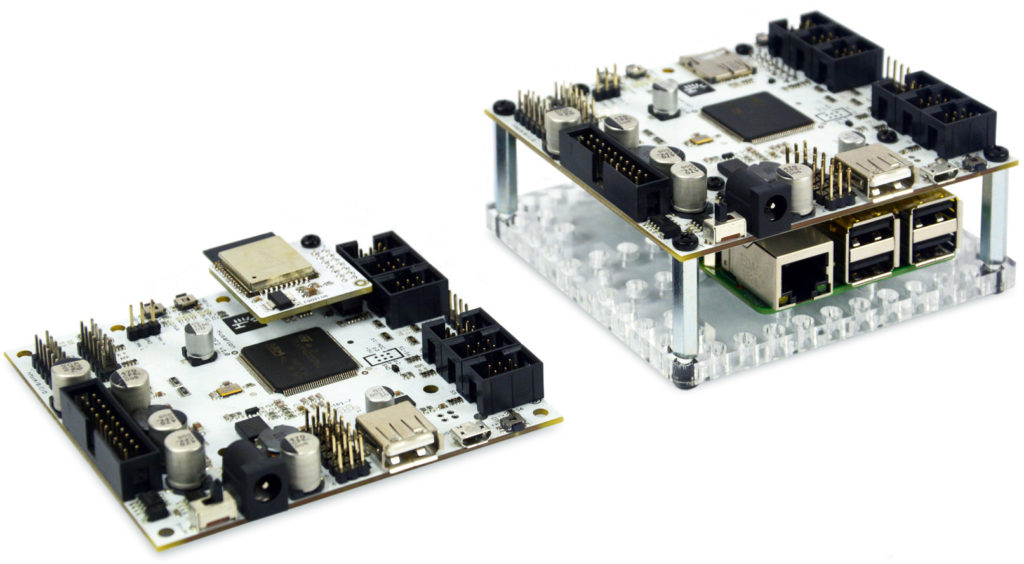
The $89 Cortex-M4 based Core2 controller board, which includes an ESP32 WiFi adapter, is also available in a version that runs Linux and Robot Operating System called the Core2-ROS. The ROS version replaces the ESP32 with a WiFi-ready Raspberry Pi 3 or Asus Tinker Board SBC.
CORE2 enables the rapid prototyping and development of consumer and service robots. It’s especially suitable for engineers designing commercial appliances and robotics students or hobbyists. Whether the next robotic idea is a tiny rover that penetrates tunnels, a surveillance drone, or a room-sized 3D printer, the CORE2 can serve as the brains behind it.
Both solutions share most of the same specifications:
- MCU -STMicro STM32F4 ARM CORTEX-M4 MCU @ 168 MHz with 192 kB RAM, 1 MB Flash
- External Storage – 1x micro SD slot
- USB – 1x USB 2.0 host port with 1A charging capability; 1x micro USB port for debugging and programming via FTDI chip
- Expansion Headers
- hRPi expansion header for
- CORE2-ROS – a single board computer Raspberry Pi 3 or ASUS Tinker Board
- CORE2 – an ESP32 based Wi-Fi module
- 2x motor headers (hMot) with
- 4x DC motor outputs with built-in H-bridges
- 4x quadrature encoder inputs 1 A cont./ 2 A max. current per output (2 A/4 A current when paralleled)
- 6x servo ports with selectable supply voltage (5 / 6 / 7.4 / 8.6 V) 3 A cont./4.5 A max. current for all servos together
- 6x 6-pin hSens sensor ports with GPIOs, ADC/ext. interrupt, I2C/UART, 5 V out
- 1x hExt extension port with 12x GPIO, 7x ADC, SPI, I2C, UART, 2 x external interrupts
- 1x CAN interface with onboard transceiver
- hRPi expansion header for
- Debugging – DBG SWD (Serial Wire Debug) STM32F4 debug port; micro USB port for serial console
- Misc – 5x LEDs, 2x buttons
- Power Supply – 6 to 16V DC with built-in overcurrent, overvoltage, and reverse polarity protection
- Dimensions – 94 x 85 mm
The Core2 and Core2-ROS can be purchased with Core2brick (which lets you connect to a Lego Mindstorms robot kit), Core2block (which lets you connect to the Arduino based Makeblock robotics kit), and Servo Controller accessory kits (it allows you to add 12 more RC servos).
Developing software for CORE2-powered robots is easy. Husarion provides Web IDE, allowing engineers to program their connected robots directly from within the browser. There’s also an offline SDK and a convenient extension for Visual Studio Code. The open-source library hFramework based on Real Time Operating System masks the complexity of interface communication behind an elegant, easy-to-use API.
CORE2 also works with Arduino libraries, which can be used with no modifications at all through the compatibility layer of the hFramework API.
For online access, programming and control, Husarion provides its dedicated Cloud. By registering the CORE2-powerd robot at https://cloud.husarion.com, developers can update firmware online, build a custom Web control UI and share controls of their device with anyone.
For more information visit Core2’s Crowd Supply page.
