A Microsoft researchers team have built and open sourced a simulation tool to help people train autonomous cars, drones and robots learn how to avoid obstacles just like they would in the real world.
It’s called the Aerial Informatics and Robotics Platform, or AirSim for short. Available for Linux and Windows, it lets you generate a random environment to train your bot or vehicle, experiment with various models and test in a range of scenarios right in your workshop.
Microsoft says that its tool is more advanced than anything of its type before it, with better physics and better recreation of the real life variables of the world outside.
“The Aerial Informatics and Robotics platform solves for these two problems: the large data needs for training, and the ability to debug in a simulator. It will provide realistic simulation tools for designers and developers to seamlessly generate the copious amounts of training data they need.”
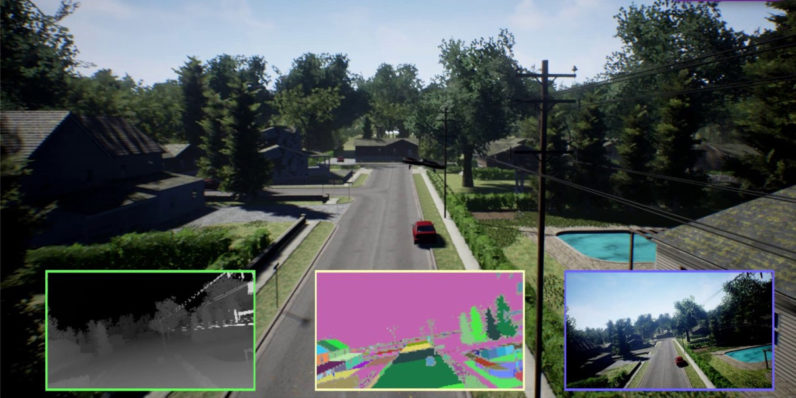
“In addition, the platform leverages recent advances in physics and perception computation to create accurate, real-world simulations. Together, this realism, based on efficiently generated ground truth data, enables the study and execution of complex missions that might be time-consuming and/or risky in the real-world. For example, collisions in a simulator cost virtually nothing, yet provide actionable information for improving the design.”
While AirSim supports controls for DJI and MavLink-based drones out of the box, it’s been designed to eventually accommodate other autonomous vehicles, hardware platforms, and software protocols by simply adding modules to the software.
The Arial Informatics Robots Platform is now available to download from GitHub with an open source licence.

[…] Earlier this year, Microsoft open-sourced “AirSim” (Aerial Informatics and Robotics), a high-fidelity system, for testing the safety of artificial intelligence systems. Microsoft’s Artificial Intelligence-based research project now includes car simulation which will further help advance the research and development of self-driving vehicles. […]